Hexy
Hexapod Robot
Hexy is a two-degree-of-freedom hexapod robot controlled by an Arduino UNO board. This project was developed as a graduation project at A. Malignani during the 2016/2017 school year.
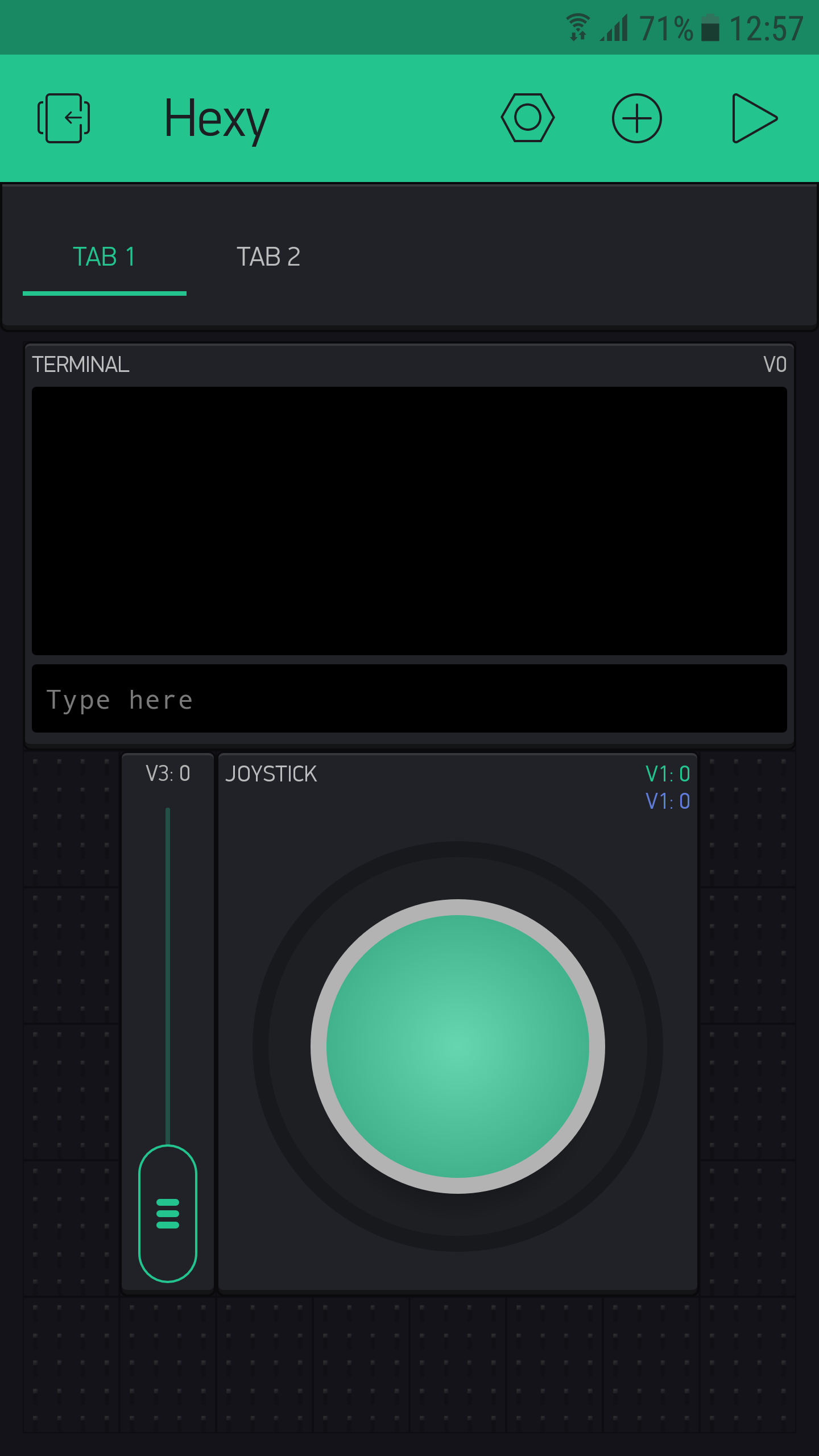
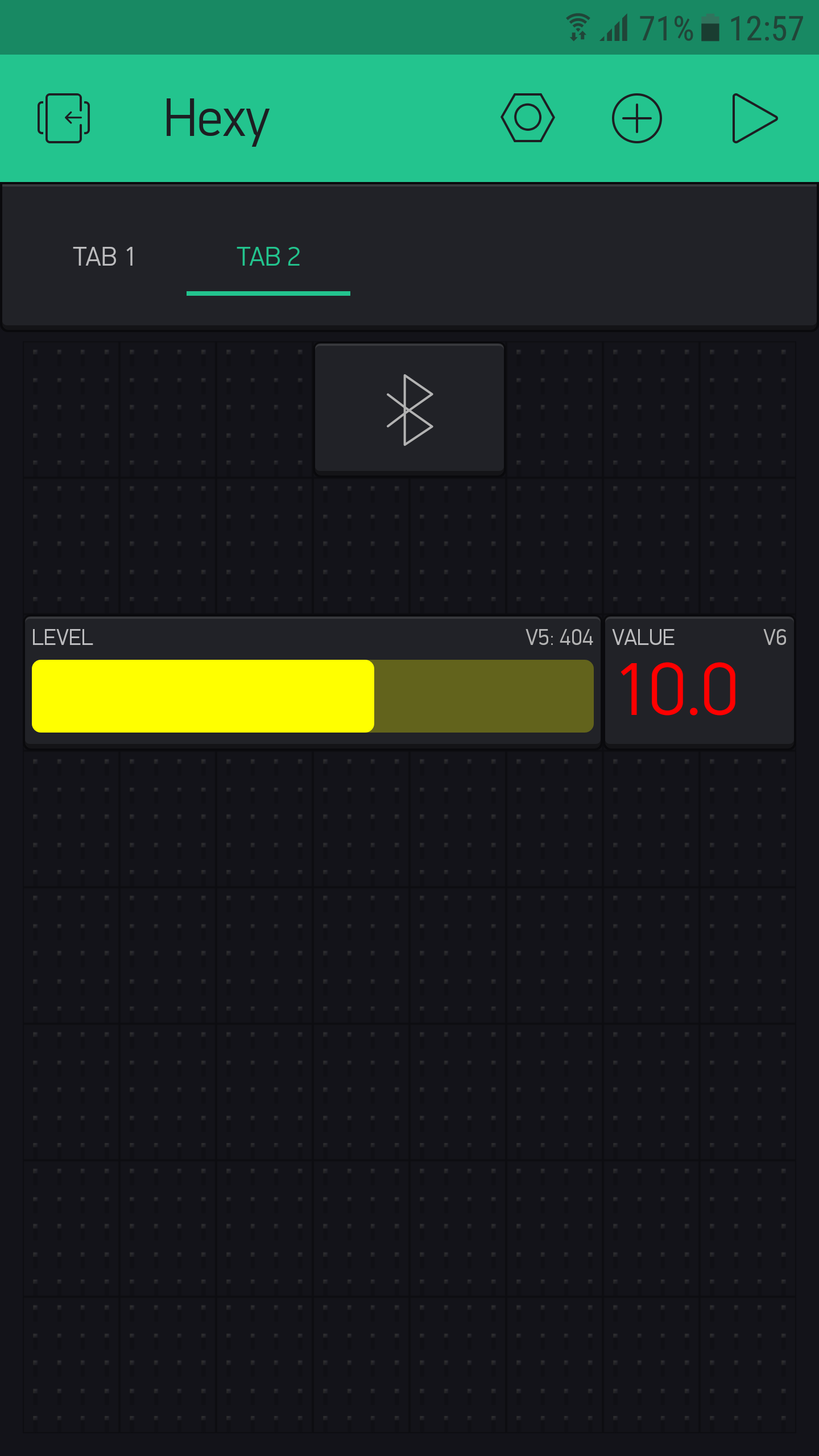
The robot has six legs, each powered by two digital servomotors, and includes a Bluetooth module for remote control via smartphone app. It’s equipped with a step-down DC-DC converter for power supply, along with an accelerometer and gyroscope for enhanced stability and movement precision.

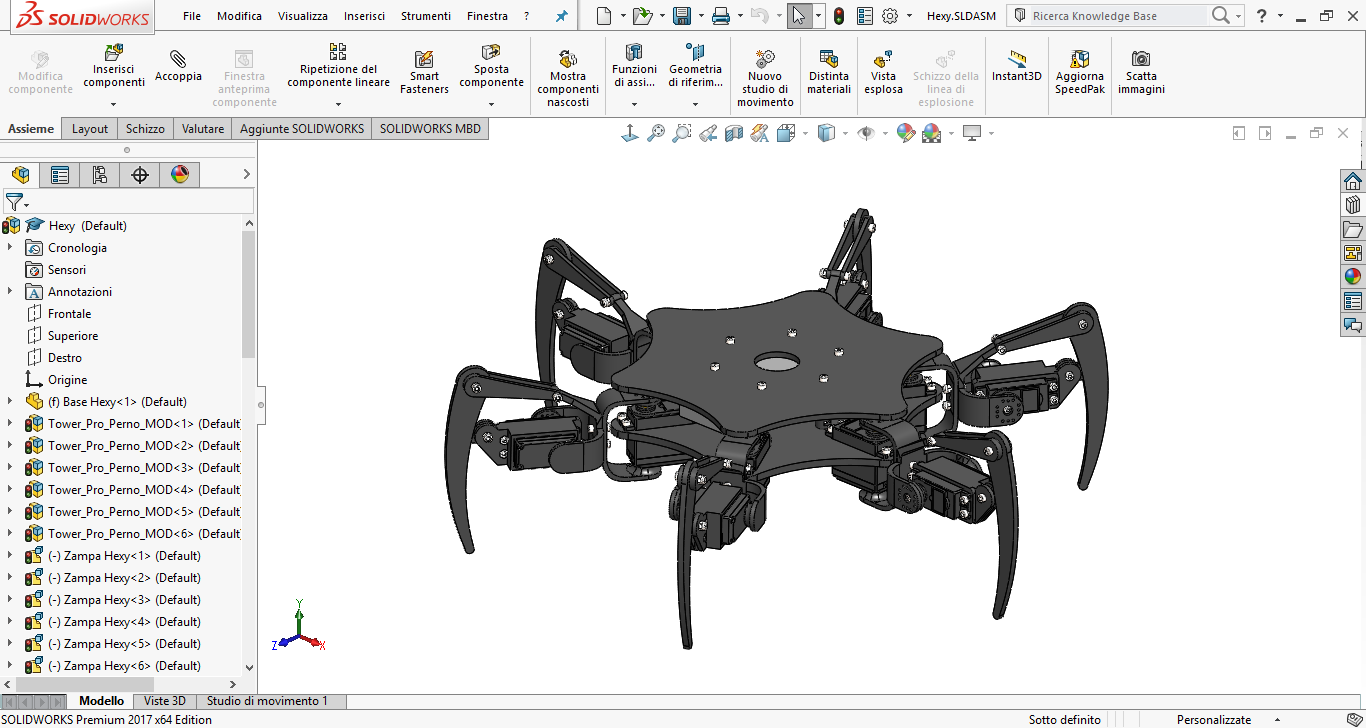
All necessary plastic parts were modeled in SolidWorks and 3D printed.
A custom PCB was designed for the Arduino Uno to optimize and simplify all the electrical connections and include all the electronic components needed for the electric circuits.